Products









Woneco IG Series Servo drive
Performance parameters:
| Control mode | Position control, JOG operation, speed contacts, etc. | |
| Encoder feedback | Ordinary incremental encoder: 2500 lines incremental standard type 2500 line incremental province-wire serial encoder: 217/216 bit absolute encoder | |
| Conditions of Use | Ambient temperature / storage temperature | Ambient temperature: 0 ~ + 50 ℃, Storage temperature: -20 ~ + 85 ℃ |
| Humidity / storage humidity | 90% RH or less (no freezing or condensation) | |
| Resistance to vibration / impact resistance | 4.9m/s2/19,6m/s2 | |
| Structure | Base mount | |
| Performance | Speed control range | 1:10000(Lower limit of the speed control range is the smooth operation at rated load without crawling) |
| Speed response | 1KHz | |
| Rate volatility (load variation) | 0 to 100% load; 0% (rated speed) | |
| Rate volatility (voltage variation) | Rated voltage ± 10%: 0% (rated speed) | |
| Rate volatility (temperature variation) | 25 ± 25 ℃: ± 0.1% or less (rated speed) | |
| Analog speed command input | Command voltage | DC±10V |
| Input impedance | Approximately20KΩ | |
| Circuit time parameter | 47 μ s | |
| Analog torque command input | Command voltage | DC±10V |
| Input impedance | About 20KΩ | |
| Circuit time parameter | 47 μ s | |
| Sequence input signal | Count | 8Point |
| Function (distribution) | Servo ON (/ S-ON), P action (/ P-CON), prohibits Story side driving (P-OT), prohibiting reverse side driving (N-OT), alarm reset () / ALM-RST, positive Zhuance torque limit (/ P-CL), reverse the measured torque limit (/ N-CL), the position deviation is cleared (/ CLR), the internal set speed switching can be allocated and the signal of the positive / negative logic change | |
| Sequence output signal | Count | 6Point |
| Function (distribution) | Servo alarm () ALM positioning completion (/ COIN) consistent speed detection (/ V-COMP) servo motor rotation detection (/ TGON) Servo ready (/ S-RDY), torque limit detection (/ CLT) Brakes (/ BK) encoder zero output (PGC) can be assigned as well as the positive / negative logic of the signal change | |
| Encoder Dividing pulse output | A phase, B phase, C: linear drive output; divider pulses: can be arbitrarily set | |
| RS-485Communications | Protocol | MODBUS |
| 1:N Communication | Can be up to N = 127 station | |
| Axis address setting | By parameter setting | |
| CANCommunications | Protocol | CANOpen (DS301 + DS402 profile) |
| 1:NCommunication | Can be up to N = 127 station | |
| Axis address setting | By parameter setting | |
| Display Function | CHARGE LED, 7-segment 5 | |
| Regeneration treatment | Built-in regenerative resistor or external regenerative resistor (optional) | |
| Overtravel (OT) prevention function | P-OT、N-OT Enter the action of dynamic brake (DB) stop, deceleration stop or free-run stop | |
| Protection | Overcurrent, overvoltage, undervoltage, overload, speeding, regeneration fault, encoder feedback error, etc. | |
| Monitoring functions | Speed, current position, command pulse accumulation, position deviation, motor current, operating status, input and output signals | |
| Accessibility Features | Gain adjustment, alarm recording, JOG operation, origin search, inertia testing | |
| Smart features | Built-in automatic gain tuning function | |
| Use load inertia | Less than 5 times of motor inertia | |
| Position control | Feedforward compensation | 0~100%(Setting unit 1%) |
| Input pulse types | Sign + pulse train, CW + CCW pulse train, 90 ° phase difference between the two-phase pulse (A phase + B phase) | |
| Input pulse form | Supports linear drive, open collector | |
| Maximum input pulse frequency | Linear drive | |
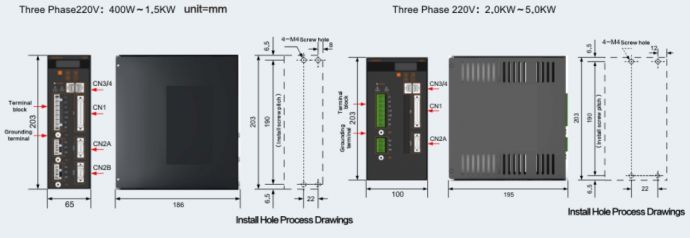
Dimensions (base model):